在上一章中,我们重点介绍了大脑神经解剖学以及大脑不同区域之间的联系。要理解这些连接如何调节行为,我们需要深入了解不同神经元群体的活动是如何传递和处理信息的。对这一点的理解,主要来自于对单个神经元产生的微小电信号的记录。
虽然通过一次记录一个或几个神经元的电信号已经让我们对神经活动有了很多了解,但随着小型化和电子技术的进步,现在能够在多个大脑区域同时记录数百个神经元的动作电位,特别是在感觉、运动或认知任务的背景下(见方框5.1)。这些技术进步,加上管理和理解大型数据集的计算方法,有望彻底改变我们对神经功能的理解。
光学成像方法是一个快速发展的技术领域,用于大规模监测神经回路的动态活动。这些方法大多使用荧光传感器(包括合成染料或基因工程编码蛋白质),通过激发后光信号的强度或波长变化来反映神经活动的变化。根据荧光激发的不同来源,已经开发出多种荧光成像技术,包括单光子、双光子和超分辨率荧光显微成像。
最常用的荧光指示剂通过监测细胞内钙水平的变化来作为神经元电活动的指标。尽管荧光钙成像的时间分辨率通常低于电生理学的时间分辨率,但利用基因编码钙指示剂的成像技术可以在数天至数月的时间范围内,同时监测行为动物中的数千个神经元。
除了钙成像外,还发展了合成和遗传编码的电活性荧光指示剂(如基因编码的电压指示剂)、神经递质浓度报告因子(如谷氨酸感应荧光受体),以及细胞内信号分子的活性状态和基因表达的监测技术。这些工具为在多个空间和时间尺度上监测神经活动提供了广泛且通用的技术手段。
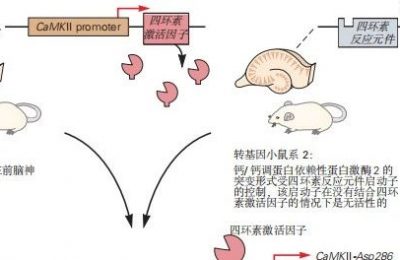
与此同时,基于单个神经元mRNA测序的现代遗传方法正在揭示促成群体活动的多种细胞类型。这些基因学方法还可以在实验期间激活或沉默特定类型的神经元,从而支持因果关系的测试(见方框5.2)。
Box 5.2 (神经元活动的光遗传学和化学遗 传学操作)
神经回路的功能分析依赖于准确操作特定神经回路元件的能力,以阐明其在生理和行为中的作用。为此,开发了基因编码的神经扰动工具,通过光遗传学(光激活工程受体)或化学遗传学(小分子控制受体)来远程控制神经元的功能。
这些外源的基因编码蛋白可以通过病毒或转基因动物的方式在特定的神经元亚群中表达,从而实现对这些细胞群的选择性操作。光遗传学技术涉及光敏蛋白的表达,通过光源激活光敏神经元。根据光遗传学致动器的类型,光激活可以通过去极化或超极化细胞膜来增强或抑制神经活动(例如,通道视紫红质等光控离子通道用于增强活动,而卤视紫红质或古菌视紫红质的光控离子泵则用于抑制活动)。
化学遗传学则使用基因工程受体远程控制神经元群体,这些受体通过遗传方法靶向特定的神经元群体,并可以通过合成的小分子配体选择性激活。设计药物激活的设计受体是其中一种常见的化学遗传工具。
这些光遗传学和化学遗传学工具能够为神经元活动提供精确的时空控制,从而探究神经元细胞类型、回路生理学与行为之间的因果关系。
在光学显微镜和电子显微镜的尺度上,高通量解剖方法正以前所未有的详细程度提供关于神经回路布线的信息。由于神经回路的复杂性以及收集到的大量数据,统计、计算和理论方法应运而生,用于提取、分析、建模和解释数据。这些方法被广泛用于解决以下问题:实验设计、从原始数据中提取信号、分析复杂数据集、构建和分析模拟数据模型,最重要的是,从结果中建立某种形式的理解。
信号的提取通常基于贝叶斯方法,推断出嘈杂记录中最可能的信号。数据分析则通常包括数据维度的缩减,不仅为了使数据更加简洁,还为了识别构建数据集的基本组成部分。神经系统的模型涵盖了从单个神经元的形态学和电生理学的详细模拟到大量神经元的抽象模型。无论模型的细节程度如何,它们的目的都是揭示神经元或神经回路的功能如何受到神经活动特征的影响。
此外,在高级功能领域,例如图像识别、游戏对战或执行复杂任务时,机器学习的理念也在日益影响神经科学研究。
本章中,我们介绍了用于描述和解释神经群体和回路活动的理论、技术和方法,并通过大脑研究的实例来加以说明。在本书的后续章节中,我们将更详细地讨论其中的许多主题。
动物和人类通过感官不断积累关于外界的信息,根据这些信息做出决策,并在必要时采取行动。要实现这一过程,感官信息必须转化为电信号,从而在大脑中产生神经活动模式。研究这种神经表征及其与外部感觉线索之间的关系,统称为神经编码,这是神经科学的一个重要研究领域。刺激的特征通过神经活动表示的过程被称为编码。
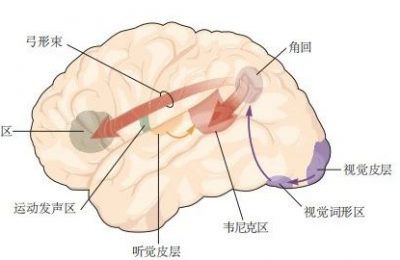
神经表征的结构在大脑如何进一步处理信息中发挥着关键作用。例如,视觉信息首先通过视网膜中的感光器对视野中特定区域的颜色和光强的反应进行初步编码。接着,这些信息在大脑初级视觉皮层中被转换,用于编码场景的边缘、形状及其在空间中的位置。随着信息传递到高阶视觉区域,视觉系统能够从场景中提取出更复杂的形状和结构,甚至实现对物体或人脸的识别。
在大脑的其他区域,听觉编码反映了声音的频谱特征,而触觉编码则在代表身体表面的地图中进行。神经元对感觉刺激的反应通过动作电位序列的形式表达,显示出刺激如何随着时间的推移发生变化。神经编码研究的目标是理解刺激特征如何驱动神经元产生反应,以及这些反应的时间结构如何与外部世界的变化相对应。
感觉神经元通过激发动作电位来编码感觉特征,将信息传递给大脑的其他区域。那些负责决策或运动控制的区域必须能够正确解释从感觉区域接收到的动作电位序列,以做出恰当的反应。从神经活动中提取信息的过程被称为解码。
神经信号的解码不仅可以由神经科学家在实验室中完成,也可以用于临床环境。例如,研究人员可以通过记录视觉或听觉神经元的活动,推断出动物或人类正在看到或听到的内容。尽管在实际操作中只能解码出刺激的某些特征,但这些结果仍然十分令人印象深刻。为了实现这一目标,开发了大量的解码程序,从简单的神经元放电率加权到更为复杂的统计方法。
解码方法是神经假体开发的核心技术,尤其适用于那些因神经系统损伤而导致大面积瘫痪的人(详见第39章)。在这些应用中,通过植入的电极记录神经元活动,通常是在顶叶皮层或运动皮层,并使用在线解码程序来解释这些记录,进而推断出患者的运动意图。随后,利用这些推断出的意图来控制计算机光标或驱动机器人肢体。
此外,解码记录的神经活动还让我们对神经回路中的活动有了深入理解,这为记忆存储与检索、计划与决策以及其他认知功能提供了新的见解。下一节将使用一种特别有趣的神经表征——即啮齿动物海马体中空间位置的编码,来进一步说明这些见解。
动物面临的最复杂的认知挑战之一是识别和记住自身在环境中的位置,特别是相对于其他显著物体的位置。例如,贮藏种子的鸟类能够记住几个月内储存食物的数百个不同位置。前一章简要介绍了与外显记忆形成有关的神经回路,包括对人、地点、事物和事件的记忆。这种记忆形式依赖于海马体、内嗅皮层以及颞叶中的相关结构。1971年,约翰·奥基夫发现了海马体中空间环境的神经表征的生理学证据。2014年,他与梅·布里特·莫泽和爱德华·莫泽一起获得了诺贝尔生理学或医学奖,以表彰他们在神经元空间表征方面的重大贡献。
奥基夫发现,大鼠海马体中的单个神经元(位置细胞)仅在动物穿越环境中特定区域时才会放电(称为细胞位置场,见图5.1.1)。后续研究表明,其他哺乳动物(包括蝙蝠、猴子和人类)的海马体中也存在类似的活动。不同的位置细胞群会对环境中不同位置进行编码。虽然单个位置细胞只能代表相对较小的空间区域,但海马体中的位置细胞群整体上覆盖了整个环境,每个位置都由独特的细胞群编码。海马体的位置编码网络提供了认知地图的一个例子,这一概念最初由心理学家爱德华·托尔曼提出,用以解释动物如何记住并导航其环境。海马体在记忆形成和空间图的编码机制方面的作用将在第52章和第54章中详细探讨。
在1971年,奥基夫能够使用的电生理方法仅限于一次记录一个位置细胞,但随后的技术进展使研究人员能够同时记录数十个甚至数百个位置细胞。关键在于,虽然单个位置细胞只能编码环境的特定部分,并且偶尔可能发出一些嘈杂信号,但整个位置细胞群体提供了更完整的空间覆盖,并增强了冗余位置编码的可靠性。这些特征为强大的计算分析铺平了道路,特别是可以通过解码位置细胞群体的活动来估算动物在环境中的位置。这是通过确定每个细胞的空间选择性并使用该选择性作为模板来解码进行中的神经活动实现的。在实际操作中,通常通过加权每个细胞的贡献来执行解码,该加权与该细胞的空间编码可靠性成正比。利用这种技术,可以在房间大小的环境中以几厘米的精度逐秒重建动物的位置(见图5.1.1C)。
基于这些空间解码技术的研究,表明海马体的功能与空间记忆和陈述性记忆密切相关。在动物积极探索环境期间,海马体的活动反映位置编码,但在动物静止或休息时,海马体会进入一种不同的状态,神经活动由半同步群体的尖波涟漪主导(见图5.1.2A)。这些事件被认为是由海马体内的回路自主产生的。
值得注意的是,在最近学习后的休息期间,特别是探索环境之后,尖波涟漪非常突出。通过解码这些短时(50至500毫秒)的尖波涟漪内活跃的位置细胞活动,可以发现海马神经元正在重演或重播最近探索过的环境轨迹。尽管这些轨迹重播与实际穿越空间的路径一致,但在时间上与主动探索有所不同。
首先,重播序列在尖波涟漪内被时间压缩,以比实际探索快10到20倍的速度发生(见图5.1.2B)。其次,重播活动可以沿着与实际行为轨迹相同的方向(正向重播)或相反的方向(反向重播)进行。因此,通过解码一个200毫秒的尖波涟漪重播事件,可以揭示出一个跨越2至4秒行为时间的虚拟心理轨迹,即从动物的经历中回放过来的轨迹。重播被认为是一种心理排练,通过这种形式,某些记忆逐渐得到巩固,这可能是海马体在记忆形成中的重要作用之一。
神经元之间的高度互连,不仅包括与邻近神经元的连接,还延伸到远端大脑区域。随着精细解剖结构的新方法的发展,我们对神经元连接模式的认识(称为连接组学)正在迅速扩展。神经元的互连模式是多样的。
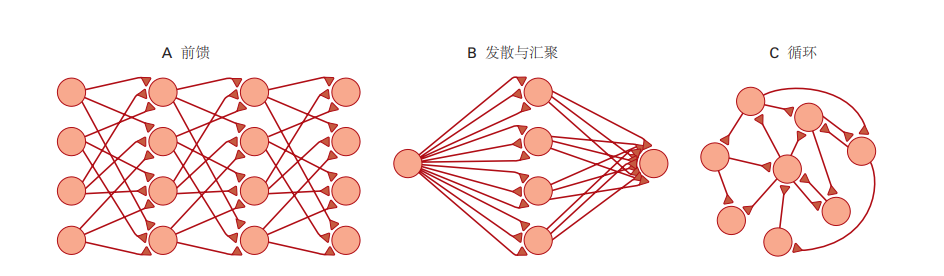
例如,从一个大脑区域到另一个区域的连接,如从丘脑到初级视觉皮层,被称为前馈连接(见图5.2.1A)。前馈连接从外围或主要区域(如视网膜、丘脑或初级视觉皮层)延伸至响应特性更复杂的更高阶区域,例如那些对特定目标具有选择性的视觉区域。通常,前馈连接的两个区域之间也存在反馈连接,例如从初级视觉皮层到丘脑的连接。局部连接则是从一个神经元延伸到另一个神经元,并最终循环回到原始神经元,这种模式称为循环连接。尽管许多神经元参与了这些前馈、反馈和循环连接,但分开分析这些不同连接基序的功能含义是有益的。
神经元之间的连接可以是兴奋性的或抑制性的。通常,兴奋性连接会导致神经放电增加,而抑制性连接会导致神经放电减少。许多神经回路受到强烈的兴奋性驱动,这种来自成百上千个突触的输入如果没有通过抑制作用加以调控,将可能导致不稳定的神经活动。兴奋与抑制的平衡是神经回路的一个重要特征,这种平衡增强了它们的计算能力。然而,如果这种平衡被打破,回路可能会变得易于产生类似癫痫发作的异常活动,如在癫痫中所见。
在哺乳动物中,视觉信息通常在一系列前馈回路中进行处理。前馈回路能够提取和识别复杂视觉场景中的目标,但它们无法产生持续的、动态的活动模式。要实现这种动态活动,则需要循环回路的参与(见图5.2.1C)。
在前馈回路中,可以识别出两个子类型:发散连接和收敛连接(见图5.2.1B)。在发散连接中,接收某种类型输入的神经元数量多于提供该输入的神经元数量,因此,突触前输入神经元中的信息在突触后神经元中被扩展。而在收敛连接中,许多突触前神经元将输入发送到较少的突触后神经元。发散和收敛连接的典型例子可以在小脑中看到,后续部分将对此进行更详细的讨论。
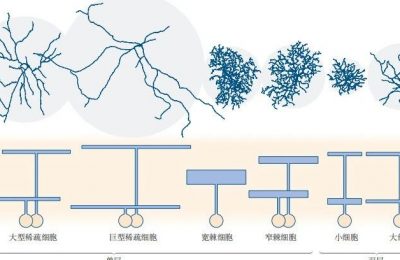
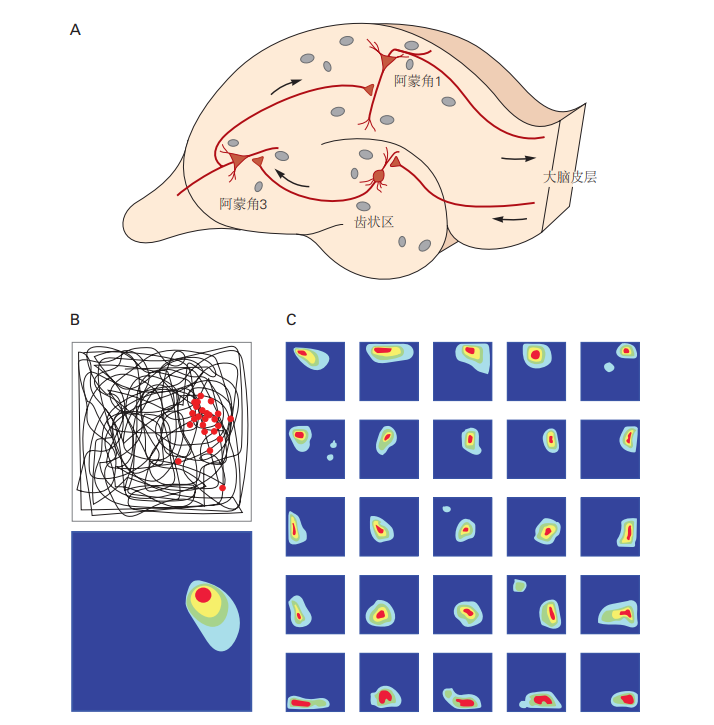
图 5.1.1:海马体位置细胞和位置细胞图。A. 输入-输出转换发生在哺乳动物海马体的三突触回路中,依次从齿状回输入区到阿蒙角3区,再到阿蒙角1输出区。每个区域的主要兴奋性神经元(红色)是主要的处理单元。这些主要细胞的活动由局部回路中γ-氨基丁酸(GABA)活动的中间神经元(灰色)调节。B. 位置细胞的放电模式展示了海马体中的活动。当大鼠穿过方形场地时,其路径以黑色线条显示。电极被植入海马体内,记录单个细胞的活动。上图:单个位置细胞在环境中某些离散位置的放电增加,每个动作电位用红点表示。下图:颜色编码的热图显示了位置细胞的激活频率,其中黄色和红色代表较高的激活率,而深蓝色表示无活动背景。C. 颜色编码的热图展示了当大鼠探索方形盒子时,海马阿蒙角1区同时记录的25个不同位置细胞的放电情况。
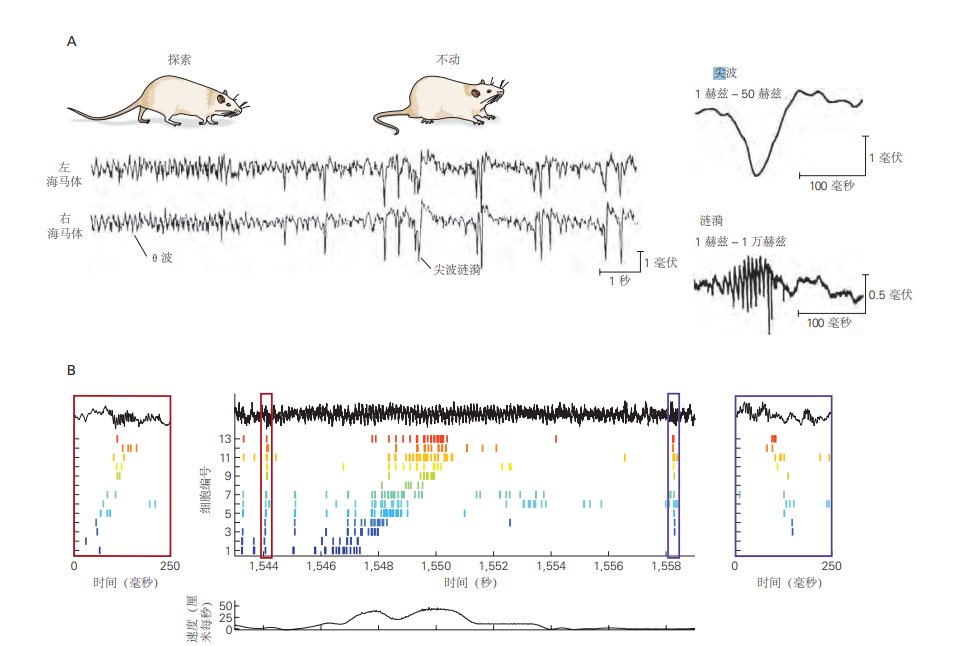
图 5.1.2:海马尖波涟漪和序列回放。A. 左图:海马体的局部场电位活动具有行为依赖性。在探索期间,存在θ波,而在不动期间出现大的负尖波。右图:从海马阿蒙角1区记录的尖波和涟漪活动。B. 在行为过程中,位置细胞的序列尖波涟漪以前向(左图)和反向(右图)方向进行回放。当大鼠沿熟悉的轨迹从左向右移动时,13个阿蒙角3区的锥体细胞在单次遍历之前、期间和之后的脉冲序列显示出正向重放(红色框)和反向重放(蓝色框)。阿蒙角1局部场电位显示在顶部(黑色轨迹),而动物的速度显示在下方。
图5.2.1:四种基本的神经回路图案。A. 前馈回路:突触连接沿着一个方向从神经元的一个处理级别延伸到另一个处理级别。B. 发散前馈连接描述了少量突触前神经元连接到大量神经元,而汇聚连接则描述了大量突触前神经元连接到较少的突触后神经元。C. 循环网络中,神经元之间通过多个方向的突触连接形成循环通路。
5.2.1 视觉处理和目标识别取决于前馈表示的层次结构
视觉信息在大脑中分层排列的多个区域中进行处理(见图5.2.2)。从视网膜产生的主要感觉输入逐步向上移动,神经元对越来越复杂的视觉特征组合做出反应,最终导致对复杂物体(如面部)的选择性识别。大量研究致力于揭示视觉层次结构所基于的原则。人工神经网络模型在机器视觉中的发展为解决这一问题提供了有益的类比。
图 5.2.2:生物和机器学习网络的比较。在视觉系统中,多个大脑区域形成一个层次结构,神经元逐渐对更复杂的物体做出选择。灵长类视觉系统的区域包括视网膜神经节细胞、丘脑外侧膝状体核、以及腹侧流视觉区域(初级视觉皮层、次级视觉皮层和V4)和下颞皮层。每个区域的神经元数量(由彩色圆点表示)不同,但它们的选择性稳步增强。机器学习网络的前馈层表示经过训练以识别图像目标的各个网络层,堆叠的子层反映了对视觉特征的选择性增强。在不同视觉区域记录的响应选择性的层次结构与机器学习网络中相应层的活动相似。
从视网膜到丘脑,再到初级视觉皮层,直至与认知相关的下颞皮层等高级视觉区域,视觉神经元对视野中特定的亮、暗和颜色模式作出选择性响应,这些模式称为神经元的感受野。随着视觉信息的处理逐步深入,神经元的感受野变得越来越大,选择性也不断增强。在每个阶段,具有特定选择性的神经元往往拥有覆盖视觉场景的感受野,这为所选特征提供了全面的覆盖。此外,每个视觉区域的感受野排列与视网膜上外部世界图像的布局相对应,形成了大脑皮层的视野图。
随着感受野的扩大和选择性的增加,神经元对目标的精确位置依赖减少,更多地依赖于目标的整体特征。总体而言,视觉处理高级阶段的神经元对视野的较大部分更为选择性,且较少依赖于位置、大小和方向等因素。这与我们在场景中能够无视位置、大小和角度变化识别目标的能力密切相关。例如,在层次结构的最高阶段,神经元可以选择性地识别面孔,无论面孔的大小或角度(即头部方向)。这种感受野的扩展、选择性的增强以及减少对视图相关因素的依赖的思想构成了机器视觉网络构建的核心。这类网络在某些物体识别任务中可以达到人类水平的性能。而且,机器在处理困难图像时所犯的错误与人类受试者犯的错误模式具有一定的相似性。
非人类灵长类动物也能在与人类类似的水平上执行这些任务。有趣的是,记录显示,沿着目标识别通路的不同视觉区域的活动与人工网络中视觉处理相似阶段的活动相对应(见图5.2.2)。
本文翻译整理自Principles of Neural Science, Sixth Edition,翻译初稿来自于GitHub/OpenHUTB,本公众号进行进一步校对排版后发布,仅用于学习交流使用,如需购买原版书籍可点击阅读原文购买。
— THE END —
来源 | Principles of Neural Science, Sixth Edition
图文排版 | 曾世纪
审核修改 | 王坤
(转载请保留此部分内容)

关注本号~

加入读者交流群~
(添加请备注单位姓名)

加入知识星球~
点亮赞与在看
让更多人看到
本篇文章来源于微信公众号: OncoLab

 微信扫一扫打赏
微信扫一扫打赏
 支付宝扫一扫打赏
支付宝扫一扫打赏